Robots come in many shapes and sizes. Here is another one to add to the catalog. OmBURo has the form of a unicycle and is intended as a mobility mechanism to be used in tight spaces shared with humans.
On I Programmer we have looked at a wide range of robots - modelled on dogs, cheetahs, even snakes. While many robots rely on wheels for getting around we’ve seen some graceful winged ones and even ones that bounce. Then of course there are the two legged, humanoid variety, epitomized by Atlas.
One of the problems with using Atlas as a rescue robot, or in any confined environment where there are people, is that the sheer bulk of the robot means it needs a lot of space to operate.
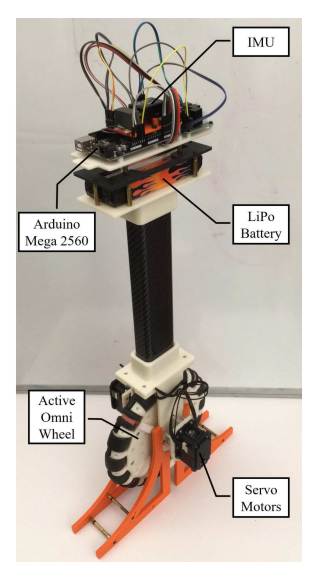
Recognizing that the characteristics needed in such situations is to have a small footprint and to be highly maneuverable, Junjie Shen and Dennis Hong, researchers at the Department of Mechanical and Aerospace Engineering, UCLA, have started to develop OmBURo - Omnidirectional Balancing Unicycle Robot. powered by an Arduino Mega 2560.
In a paper accepted for ICRA 2020, OmBURo is described as a novel unicycle robot with active omnidirectional wheel.
As can be seen in this video:
the effect is that the unicycle robot can drive in both longitudinal and lateral directions simultaneously. Thus, it can dynamically balance itself based on the principle of dual-axis wheeled inverted pendulum.
As the arxiv paper explains, the major component of OmBURo is the active omnidirectional wheel which has small free rollers around the circumference, perpendicular to the spinning direction.

The effect is that omni wheels can be driven in both longitudinal and lateral directions without changing the orientation of the main wheel. However, since the rollers are passive, several omni wheels have to work in conjunction with each other to perform the desired driving maneuvers such as lateral side to side movement.
With its very simple and compact structure together with agile and omnidirectional mobility, OmBURo might be the ideal locomotion mechanism for robots to be used in human environments in the future.

More Information
OmBURo: A Novel Unicycle Robot with Active Omnidirectional Wheel (arxiv)
Related Articles
Atlas the Gymnast, Spot the Quadruped
MIT’s Cheetah Robots Exhibit Agility
Pepper - Aldebaran’s New Robot Designed To Be Your Friend
This Is Not The Robot Butler You Are Looking For - ATLAS Does Chores
How Many Robot Dogs Do You Need To Haul A Truck?
To be informed about new articles on I Programmer, sign up for our weekly newsletter, subscribe to the RSS feed and follow us on, Twitter, Facebook or Linkedin.
Comments
or email your comment to: [email protected]